Cloud Water Vertical Distribution
One critical component of characterizing clouds in the vertical dimension is estimating the vertical distribution of cloud water. Typically, active sensors – like CloudSat and EarthCARE – are used for this purpose, but unfortunately they lack the spatial and temporal coverage that is needed for near real-time use. This motivates the OVERCAST team to explore the use of passive satellite imagery from LEO and GEO imagers to characterize the vertical distribution of water within clouds. While passive imagers have limited physical sensitivity to cloud water content deep within clouds, it is by exploiting statistical relationships between observations at cloud-top that reasonably accurate estimates of cloud vertical profiles can be determined in some cases. This is achieved by training neural networks to use passive imager observations to estimate standardized vertical profiles from collocated CloudSat profiles. Once these standardized profiles are obtained, they are combined with retrievals of cloud-top height, cloud-base height, and cloud water path to render a vertical profile of cloud water content. Additionally, work is being done on methods to improve estimates of optical properties like cloud water path at night by emulating the daytime product using only infrared channels. These optical properties are critical for rendering 3D profiles of cloud water content. This may allow for extended daytime-like cloud optical property estimates across the terminator into the night and improve OVERCAST’s global 3D depiction of clouds.
- To improve cloud vertical profiles.
- To manage the consistency between different LEO and GEO sensors in OVERCAST.
- To work on methods to improve estimates of optical properties like cloud water path at night by emulating the daytime product using only infrared channels.
Goals:
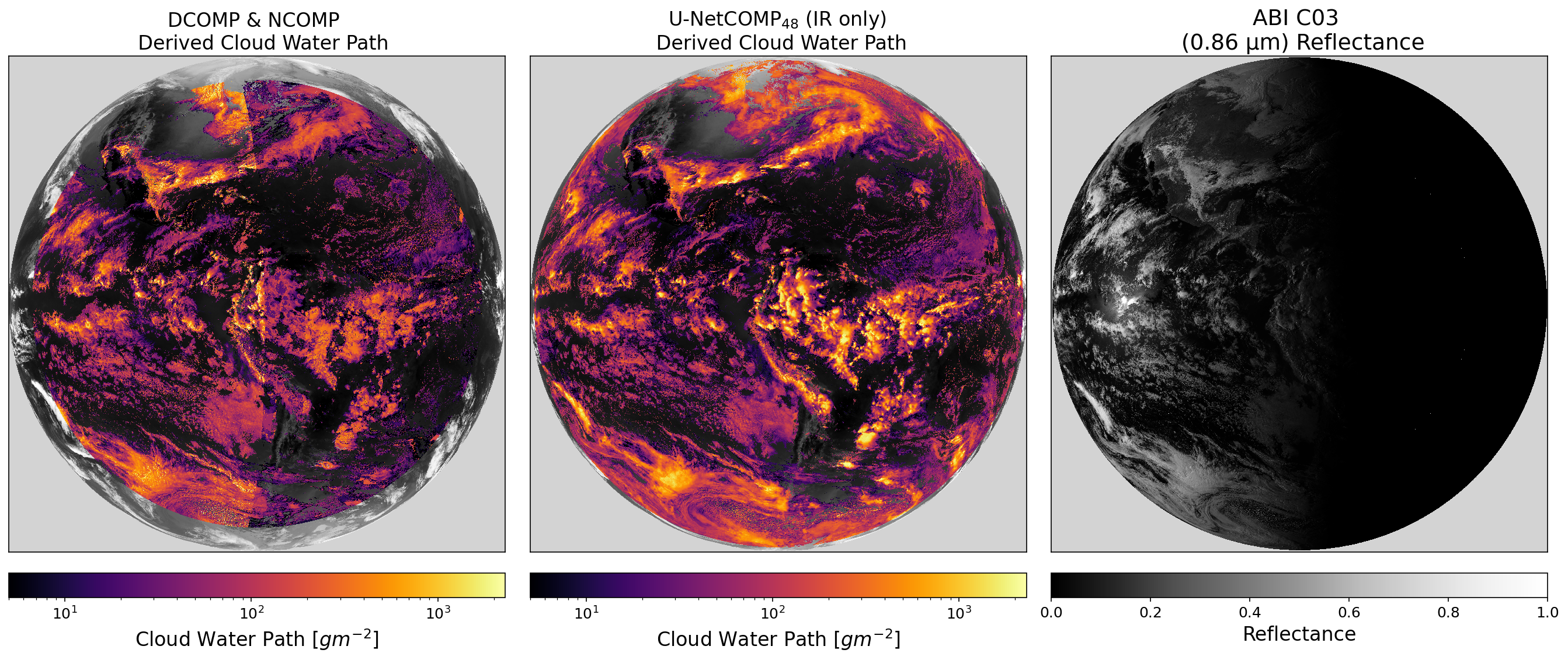
Figure: CLAVR-x and the NOAA operational products currently use two different algorithms to estimate cloud optical depth and cloud effective radius. DCOMP runs during the daytime and uses a pair of visible and near-infrared channels, while NCOMP runs at night and uses only infrared channels. Due to their limited sensitivity to optically thick clouds, physics-based IR retrievals like NCOMP differ significantly from daytime products, resulting in terminator artifacts when combined with DCOMP (left panel). We developed a machine learning emulator (U-NetCOMP; middle panel) that mimics daytime DCOMP retrievals by leveraging both spatial and spectral variability in the IR channels. We find that U-NetCOMP significantly reduces the impact of the day/night terminator and provides cloud property estimates that are much more consistent with daytime products. U-NetCOMP estimates also outperform NCOMP when compared to ground-based remote sensing instruments and to VIIRS products that utilize lunar reflectance at night.